М.О. Корлякова, Е.Ю. Прокопов, П.К. Новиков
8
Однако исследование всех точек «правого» кадра займет значи-
тельное время. Для повышения скорости обработки при построении
градиентов «правого» кадра следует пропускать монотонные обла-
сти. Отфильтровать их можно, рассчитав среднее квадратическое от-
клонение
между горизонтальным и вертикальным градиентами (ес-
ли
< 1, то область является монотонной). Кроме того, для повыше-
ния скорости обработки и фильтрации ложных особенностей будем
сравнивать только области вдоль эпиполярных линий [3].
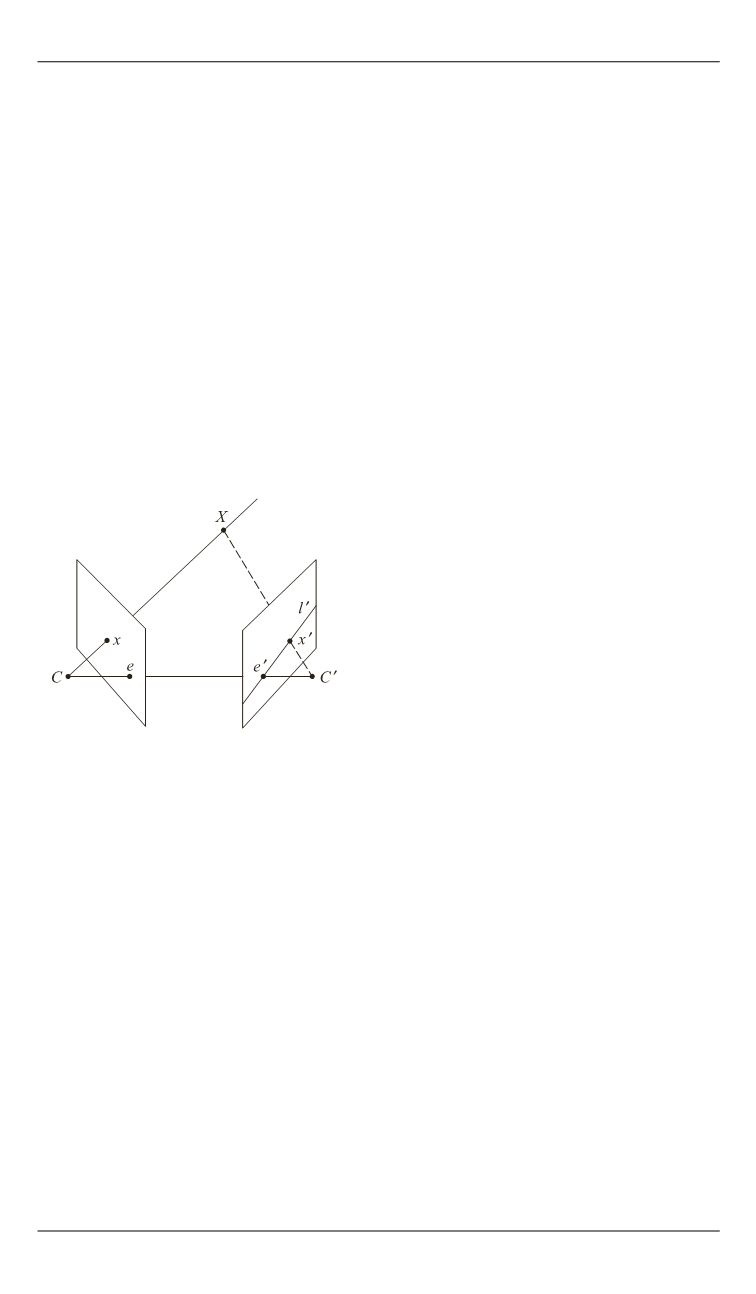
Рассмотрим пример. Пусть имеются две камеры (рис. 4). Точка
пространства
X
проецируется в
x
на плоскость изображения левой
камеры и в
x
на плоскость изображения правой камеры. Прообразом
точки
x
на изображении левой камеры является луч
.
xX
Этот луч
проецируется на плоскость правой камеры в прямую
,
l
называемую
эпиполярной линией. Образ точки
X
на плоскости изображения пра-
вой камеры обязательно лежит на эпиполярной линии
.
l
Таким образом, каждой точке
x
на изображении левой камеры со-
ответствует эпиполярная линия
'
l
на изображении правой камеры.
При этом пара для
x
может лежать
только на соответствующей эпипо-
лярной линии.
На рис. 5 представлен результат
работы алгоритма сопоставления
точечных особенностей. Здесь вы-
делены эпиполярные линии, а так-
же крестиками отмечены точки, со-
ответствующие особым точкам ле-
вого кадра.
Стоит отметить, что на рис. 2 и 4
имеются ложные соответствия. Для
их отсечения используют алгоритмы фильтрации и расширения (рис. 6).
При этом в каждой области соответствия «левого» и «правого» кадров
осуществляется поиск точного попиксельного сопоставления элементов
изображений, что позволяет значительно увеличить число сопряженных
точек и повысить точность определения их координат.
3. Сопоставление стереопар, получаемых в моменты времени
i
t
и
1
i
t
. Для сопоставления следующей стереопары в качестве опорных
точек используются особые точки предыдущей стереопары.
Алгоритм сопоставления также основан на вычислении евклидо-
ва расстояния между разностями градиентов. Однако использовать в
качестве фильтра эпиполярную линию здесь нельзя, так как за про-
межуток времени
1
i
i
t
t
(полное время обработки стереопары от
Рис. 4.
Схема определения по-
ложения эпиполярной линии
стереопары (
С
,
C
— центр
первой и второй камеры соот-
ветственно)


