Нейросетевой поиск особых точек для системы технического зрения…
7
для которой формируем алгоритм поиска особых точек, имеет практи-
чески параллельные оптические оси и идентичные камеры, что позволя-
ет исследовать кадры попиксельно. В рассматриваемом случае для
определения сходства, как и ранее, используем евклидово расстояние.
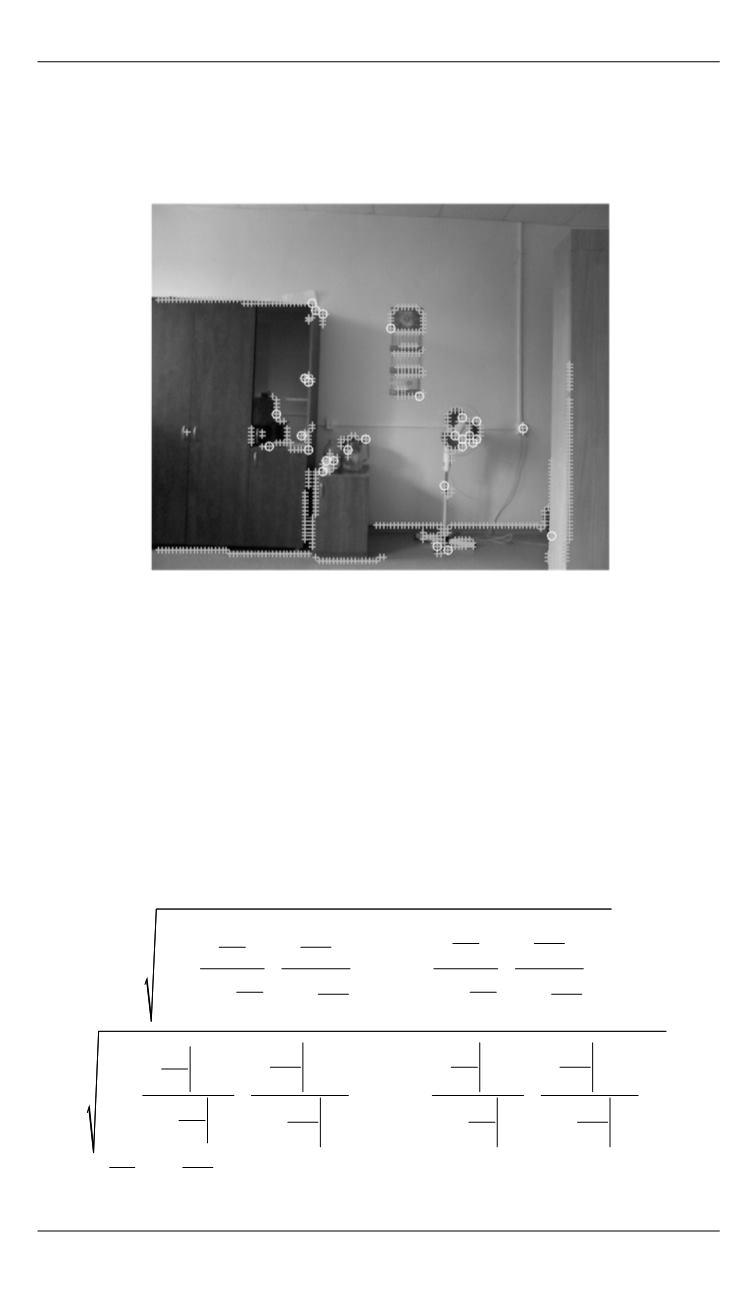
Рис. 3.
Выделение особых точек изображения из множества областей
кандидатов с использованием сети радиальных нейронов
Пусть
( , )
l x y
— набор особых точек «левого» кадра, а
( , )
r x y
—
набор соответствующих точек на «правом» кадре. Сопоставление то-
чек будем проводить на основании сравнения градиентов окружаю-
щих точку областей. Для этого рассчитаем градиент в найденной
точке
*
( , )
l x y
, а затем, перебирая все возможные точки
( , )
j
r x y
,
найдем такую точку
*
( , ),
r x y
для которой евклидово расстояние
между градиентами точек
*
( , )
l x y
и
*
( , )
r x y
является минимальным,
т. е.
*
( , )
l x y
является отображением
*
( , ),
r x y
если
*
*
*
*
*
2
2
2
min
max
max
max
max
max
max
max
j
i
j
i
i
j
i
j
j
i
i
i l
i r
i l
i
j
i l
i r
dR
dL
dR
dL
dy
dy
dx
dx
dL
dR
dL
dR
dx
dy
dx
dy
dR
dL
dL
dx
dy
dx
dL
dR
dL
dx
dx
*
*
*
2
,
max
j
i r
j
i
i l
i r
dR
dy
dR
dy
dy
где
1, ,
1, .
i
n j
m


