Исследование вынужденных колебаний с возмущением инерционного типа
3
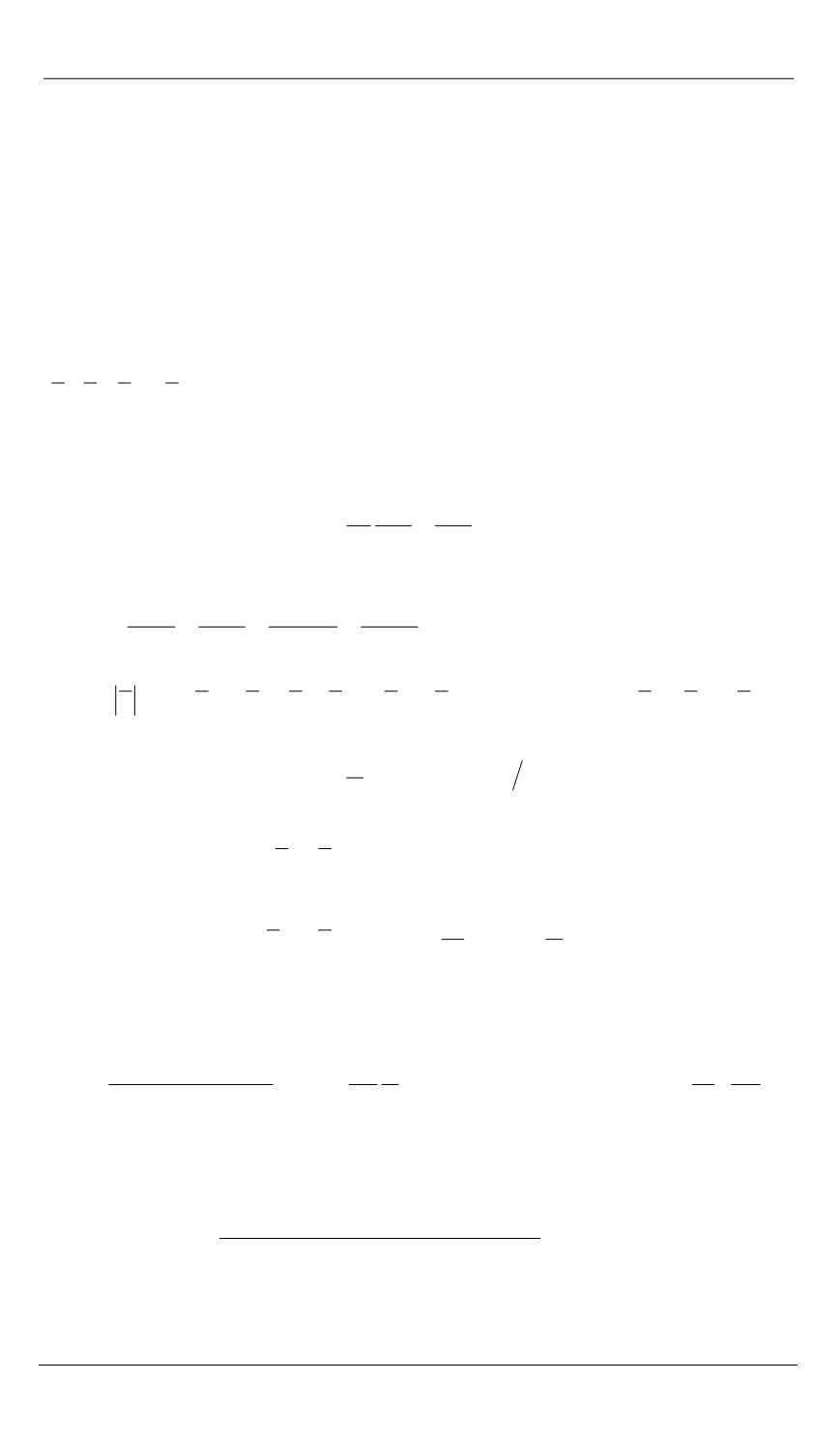
Рассмотрим линеаризованную математическую модель движения
каретки. На расчетной схеме установки (рис. 1,
б
) длина стержня
15
ма-
ятника равна
l
1
,
OC = l
, масса каретки равна
M
, массу
m
груза
13
счита-
ем сосредоточенной в точке
C
, масса стержня
12
равна
m
1
. Колеса
3
со-
вершают плоское движение, но в силу их малой массы будем учитывать
ее в общей массе каретки
M
при прямолинейном поступательном дви-
жении последней. Система имеет две степени свободы, обобщенные
координаты:
x
— линейное перемещение каретки и
— угловое от-
клонение маятника. Изменение координаты
задано, а уравнение
x
=
x
(
t
) необходимо определить. Примем, что колеса катятся без сколь-
жения, поэтому работа на перемещениях точек приложения сил
тр тр
, ,
,
N N F F
равна нулю.
Для составления дифференциального уравнения движения карет-
ки используем уравнение Лагранжа 2-го рода
x
d T T Q
dt x x
, (1)
где
1
1
2
2
2
2
1
z
2 2
2
2
C
C
C
m v
mv
Mv
J
T
— кинетическая энергия;
,
v v x
,
C r
e
v v v
1
1
1
,
C e
r
v v v
l ,
r
v OC
1
,
e e
v v v
1
1
,
2
r
l
v
1
2
1
12
C z
J m l
,
2
2
2 2 2
2 cos ,
e r
C
v v v
x l
x l
1
1
1
2
2
1
2
2
2 1
2 cos
4
2
e
r
C
l
l
v v v
x
x
и окончательно —
1
2
2 2
1
1 1
2
1
1
cos
.
2
2 l
4 2
C z
M m m x
l
m l
T
m xl
ml
J m
Обобщенная сила
0
0
x
2 x,
x
c x x c x x
x
Q
cx
x
где
x
0
и
c
— начальная деформация и жесткость пружин;
—
коэффициент вязкого трения.


