В.В. Дубинин, В.В. Витушкин
2
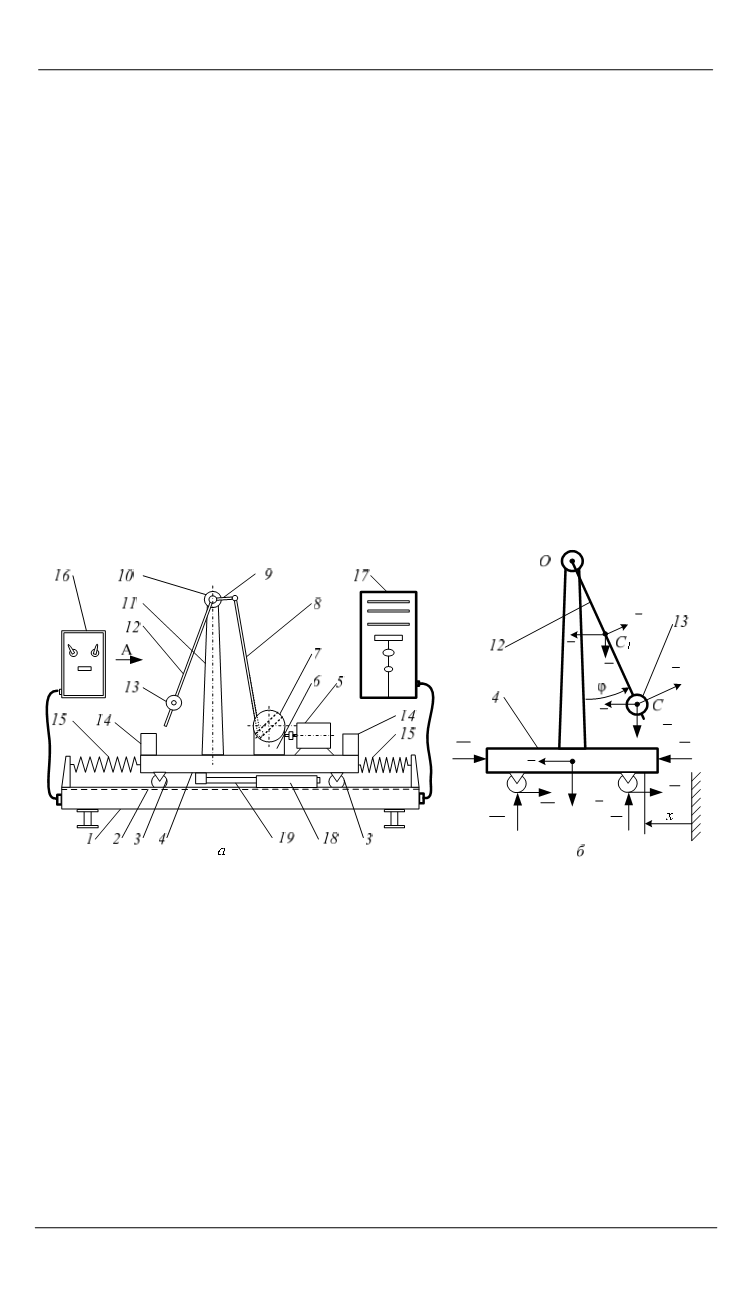
новлен на стойке
11
, закрепленной на основании, и снабжен грузом
13
и рычагом
9
, шарнирно соединенным со штоком
8
. При этом груз
можно закреплять на стержне маятника на различных расстояниях от
его оси вращения. Маятник совершает вынужденные колебания в со-
ответствии с законом, близким к синусоидальному. Эти колебания
обеспечивают формирование возмущающего воздействия на каретку,
которая соединена с основанием пружинами
15
и на которой уста-
новлены также дополнительные сменные грузы
14
. Устройство
снабжено потенциометрическим датчиком
10
угла поворота маятни-
ка, индуктивным датчиком
18
продольных перемещений каретки,
блоком
16
электропитания электродвигателя и датчиков и ПЭВМ
17
.
При этом датчик
18
выполнен в виде катушки, установленной на ос-
новании
1
, и ферромагнитного стержня
19
, закрепленного на каретке.
Сменные пружины
15
и грузы
14
позволяют изменять жесткостные и
инерционные свойства системы, получать и исследовать различные
амплитудно-частотные (АЧХ) и фазочастотные (ФЧХ) характеристи-
ки вынужденных колебаний каретки.
F
F
тр
F
тр
F
N
N
gm
gm
1
r
v
e
v
v
gM
1
r
v
e
v
Для вынужденных колебаний каретки, вызванных возмущением
инерционного типа, при изменении частоты вынужденных колебаний
строят теоретические кривые АЧХ и ФЧХ. Вычисление амплитуды и
разности фаз осуществляют на основе анализа сигналов, снимаемых с
датчиков угла отклонения маятника и линейного перемещения карет-
ки, т. е. сигналов возмущения и вынужденных колебаний. Запись
сигналов и их обработку, получение параметров вынужденных коле-
баний тележки проводят с помощью ПЭВМ. Программное обеспече-
ние рассматриваемого комплекса реализовано как в оригинальном
исполнении, так и в среде системы LabView 7.0.
Рис. 1.
Схемы электромеханической установки:
а
— конструктивная;
б
— расчетная


