Захват и отслеживание удаленных объектов в видеопотоке
7
кой эффективности при использовании алгоритма непрерывно адап-
тирующегося сдвига отслеживаемый объект
Ob
t
(
X
,
Y
) должен иметь
четкую цветовую границу с фоном, а в данном случае это требование
не выполняется. Примеры работы алгоритма Лукаса – Канаде и
непрерывно адаптирующегося сдвига показаны на рис. 4. В реальных
условиях довольно часто возникает необходимость отслеживания
объекта
Ob
t
(
X
,
Y
), практически неотличимого от фона, для этого
больше подходит алгоритм Лукаса – Канаде. Существует несколько
путей использования этого алгоритма при решении задачи отслежи-
вания удаленного объекта
Ob
t
(
X
,
Y
). Рассмотрим один из них.
а
б
в
г
д
е
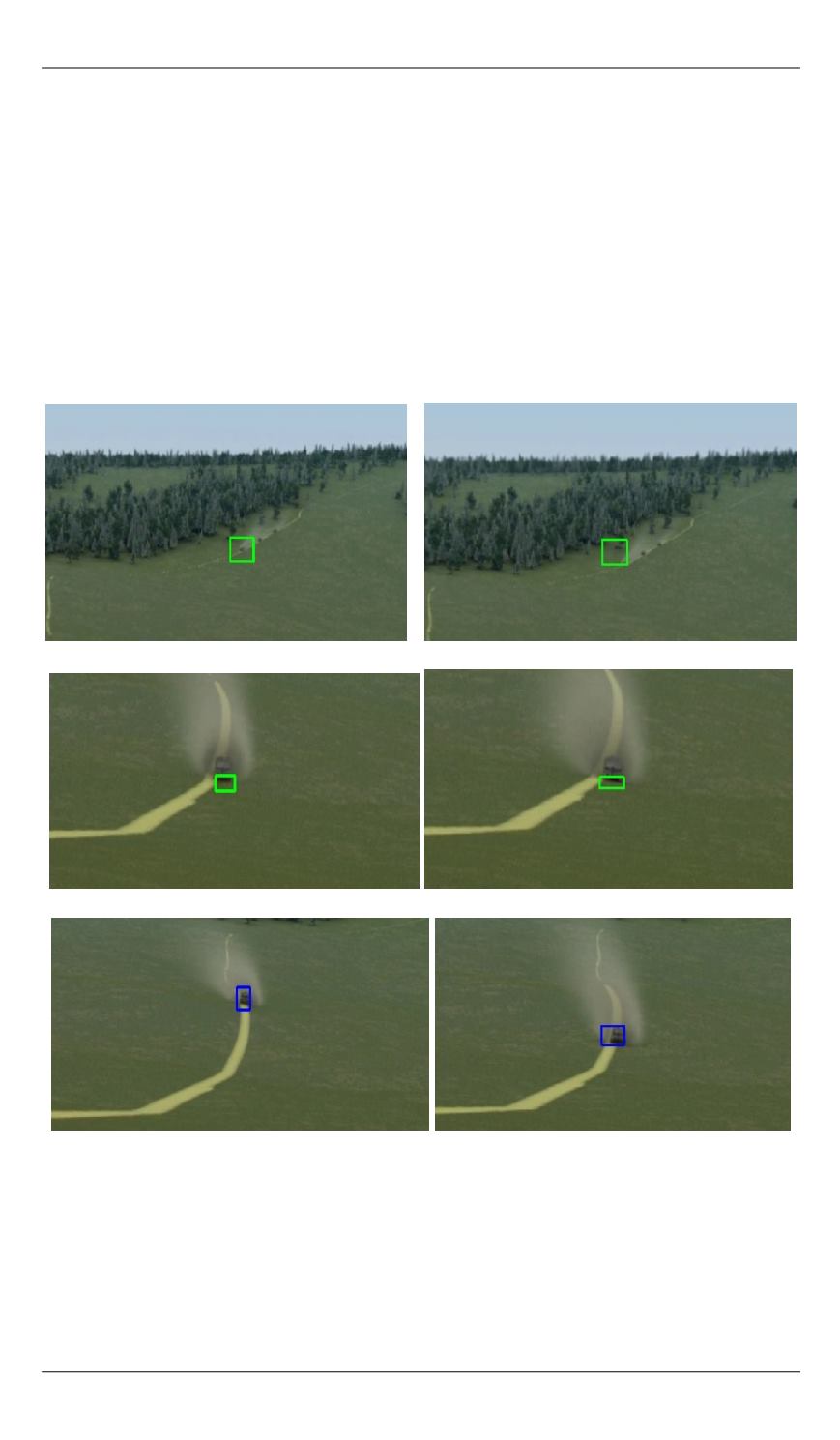
Рис. 4.
Демонстрация работы алгоритмов непрерывно адаптирующегося
сдвига (
а–г
) и Лукаса – Канаде (
д
,
е
):
а
,
б
— алгоритм теряет удаленный объект;
в
,
г
— при приближении объекта к
камере алгоритм захватывает участок объекта, сильнее всего отличающийся по
цвету от фона, — черный бампер автомобиля;
д
,
е
— алгоритм корректно
отслеживает удаленный объект


