А.Н. Алфимцев, Н.А. Демин
4
Кроме того, в процессе исследования рассмотренные алгоритмы
были проверены на устойчивость под влиянием различных негатив-
ных параметров. Результаты проверки приведены в табл. 2.
Таблица 2
Влияние негативных параметров видеопотока
на работу алгоритмов слежения
Алгоритм
Негативный параметр
Объект
движется
очень
быстро
Объект мало
отличим по
цвету от фона
Подвиж-
движ-
ный фон
Размеры объ-
екта меняются
со временем
Шаблоны движений
–
+
–
+
Сдвиг среднего
–
–
+
–
Непрерывно адап-
тирующийся сдвиг
–
–
+
+
Лукаса – Канаде
–
+
+
–
Виолы – Джонса
+
+
+
+
а
б
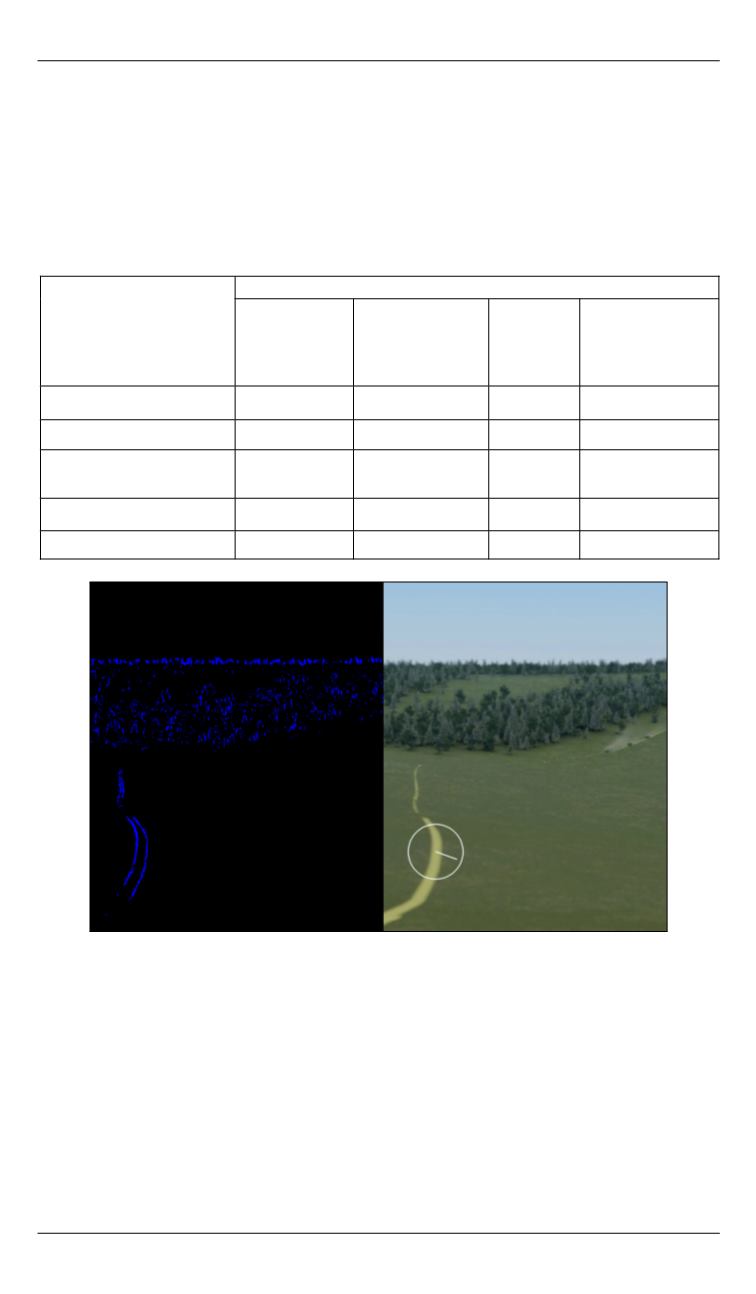
Рис. 1.
Алгоритм шаблонов движений ошибочно принимает дорогу за дви-
жущийся объект:
а
— обработанное изображение;
б
— исходное изображение с выделенным
объектом
Рассмотрим алгоритмы, которые позволяют автоматически рас-
познать нужный объект
Ob
t
(
X
,
Y
), — Виолы – Джонса и шаблоны
движений. При автоматическом решении данной задачи существует
вероятность возникновения ошибки II рода: захват участка фона вме-


