Измерение расстояния до движущегося объекта с помощью комплексной системы …
7
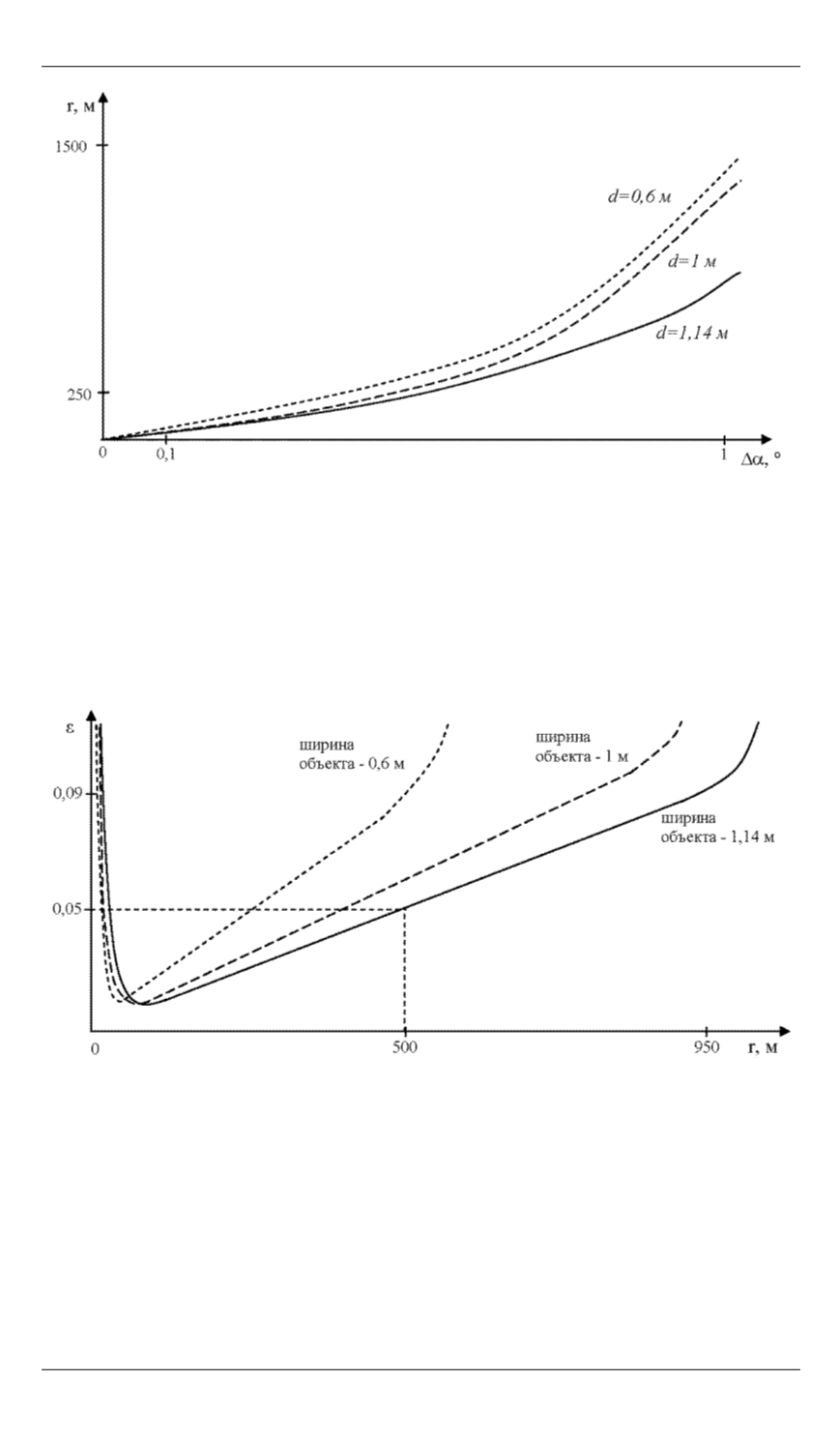
Рис. 2.
Зависимость погрешности определения положения объекта
от ошибки определения угла между осями камер (при величине
стереобазы 0,60 м, 1,00 м, 1,14 м)
Получается, что для объекта, ширина которого меньше чем база
стереопары, предлагаемый метод будет точнее, чем метод пропорции
при прочих равных величинах: угле обзора, разрешении изображения
(рис. 3).
Рис. 3.
Зависимость погрешности метода стереозрения от расстояния до
объекта для различных геометрических размеров изучаемой цели
Следовательно, данный метод целесообразно использовать для
измерения расстояния до малогабаритных объектов, находящихся на
больших дистанциях (в нашем примере – до 500 м).
На рис. 4 представлен результат работы программно-аппаратного
комплекса по распознаванию движущегося объекта (машинка с ди-
станционным управлением), созданного на основе двух видеокамер и
программного модуля, который реализует описанные выше процеду-


