3
Регистрация дальнометрических и телевизионных данных при построении...
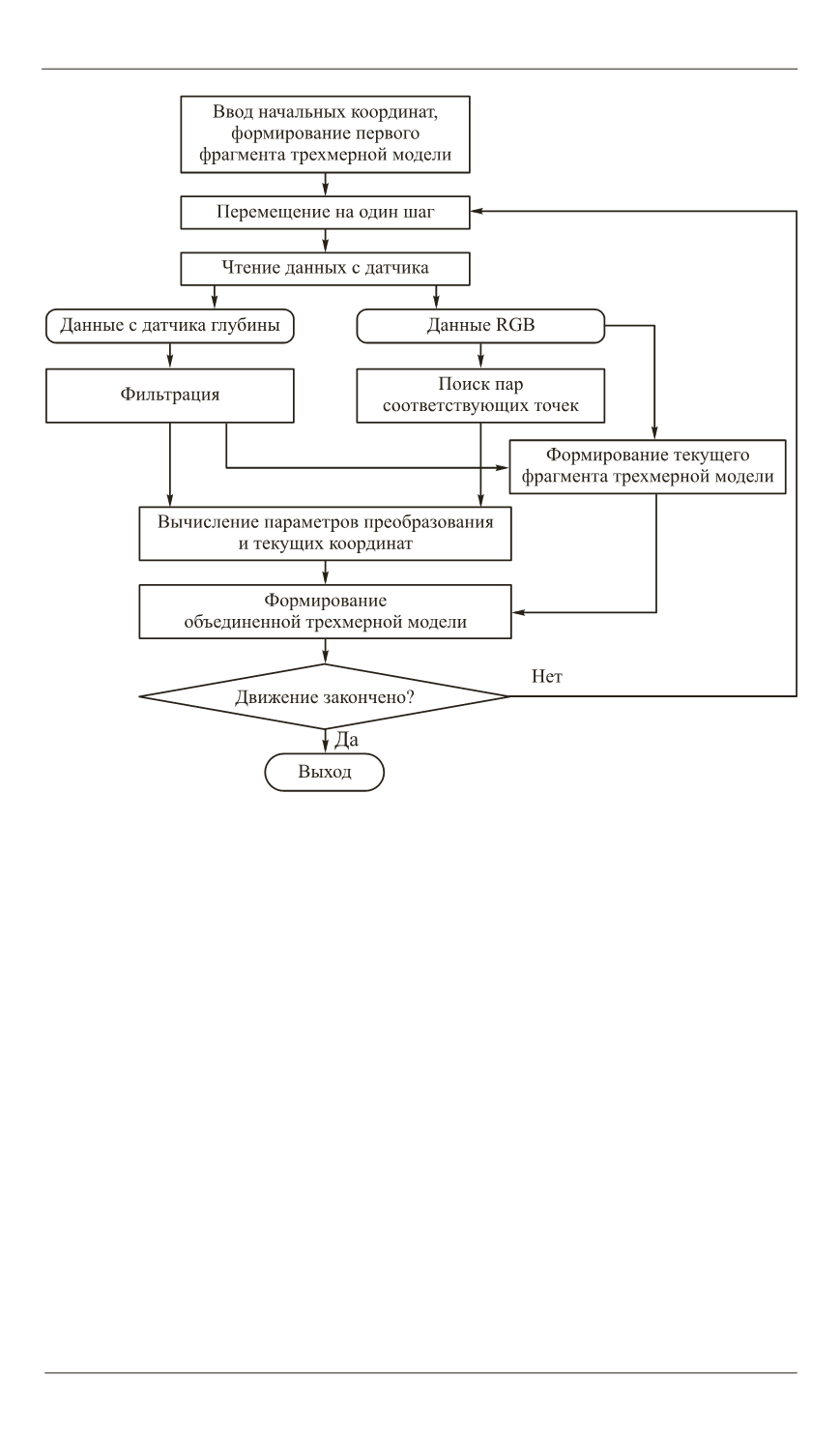
Рис. 2.
Блок-схема алгоритма
движения. Для выполнения третьего условия необходимо, чтобы авто-
корреляционные функции дальнометрических и (или) телевизионных
изображений имели выраженный максимум, что характерно для ис-
кусственных (индустриально-городская среда, помещения) и естествен-
ных внешних сред.
Решением навигационной задачи (вычисление приращений коор-
динат точек съема изображений по последовательности этих изображе-
ний) занимаются модули, приведенные на рис. 2.
Поиск пар соответствующих точек на двух RGB-изображениях (но-
вом и предыдущем) состоит из двух этапов:
1) вычисление локальных дескрипторов в обоих изображениях;
2) нахождение попарного соответствия дескрипторов из двух
изображений.
Локальные дескрипторы представляют собой вектора признаков,
сформированные по отдельным фрагментам изображения. Существу-
ет много алгоритмов вычисления дескрипторов, например, SIFT
(Scale Invariant Feature Transform), SURF (Speeded Up Robust Features),


