А.С. Мартынов, Г.И. Уткин
8
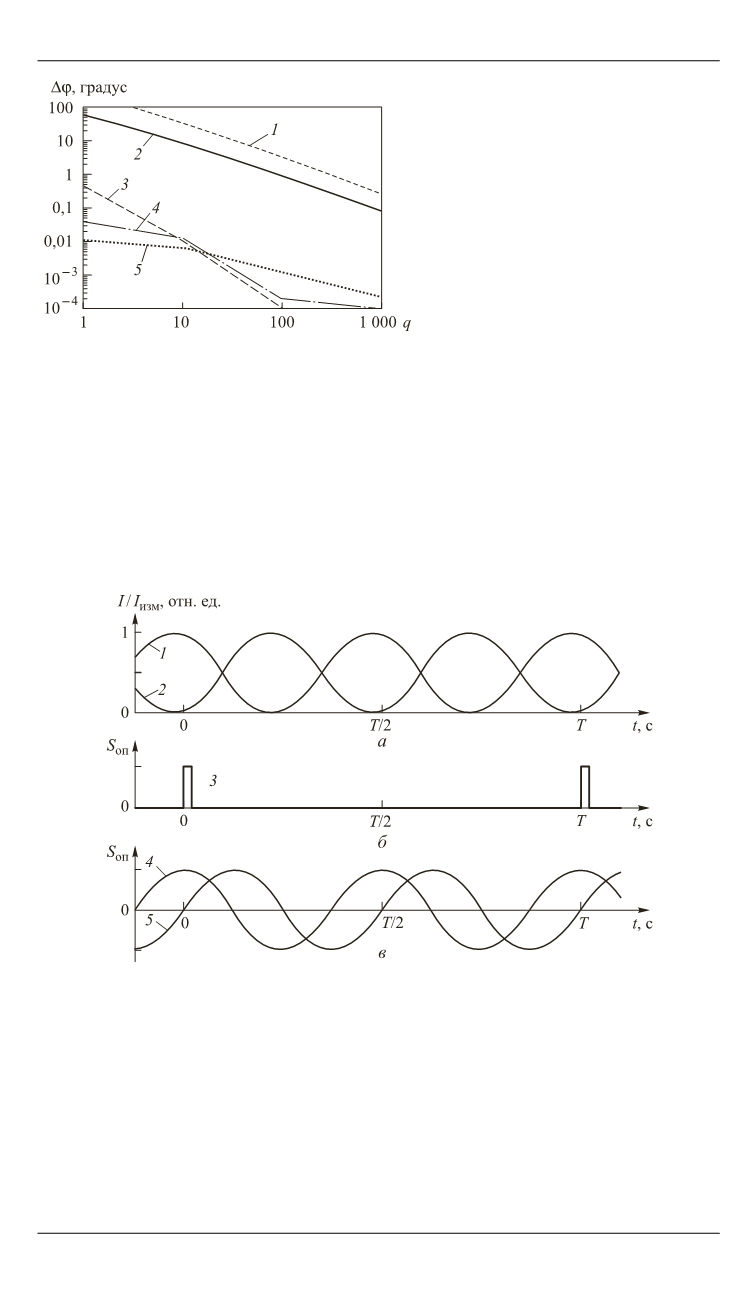
Для рассмотренных алгоритмов требуется один или два опорных
гармонических сигнала с частотой, равной частоте измерительного
сигнала. Частоту этих сигналов и время измерения предложено опре-
делять на основании периодов времени между двумя последователь-
ными импульсами сигнала опорного тракта (рис. 4). Опорные сигна-
лы формируют в виде совокупности отсчетов в моменты времен дис-
кретизации измерительных сигналов. Это обусловливает отсутствие
шумов, в том числе вызванных аналого-цифровым преобразованием.
Рис. 4.
Определение частоты опорных гармонических сигналов и времени
измерения
изм п.м ист
(
):
I
I
= τ
а
— сигналы измерительного тракта;
б
— сигнал цифрового опорного тракта;
в
—
опорные гармонические сигналы
Проведенная оценка показала, что погрешность определения пе-
риода измерения существенно влияет на погрешность вычисления
ФС при использовании методов на основе рассмотренных алгорит-
мов и не должна превышать 10
–4
.
Рис. 3.
Погрешность вычисле-
ния ФС от отношения сигнал/
шум:
1
— компараторный метод;
2
,
3
— корреляционные алгоритмы
при
ϕ
, равном нулю и 89° соот-
ветственно;
4
,
5
— ортогональные
алгоритмы при
ϕ
, равном 45° и
нулю соответственно


