А.Е. Юдин
4
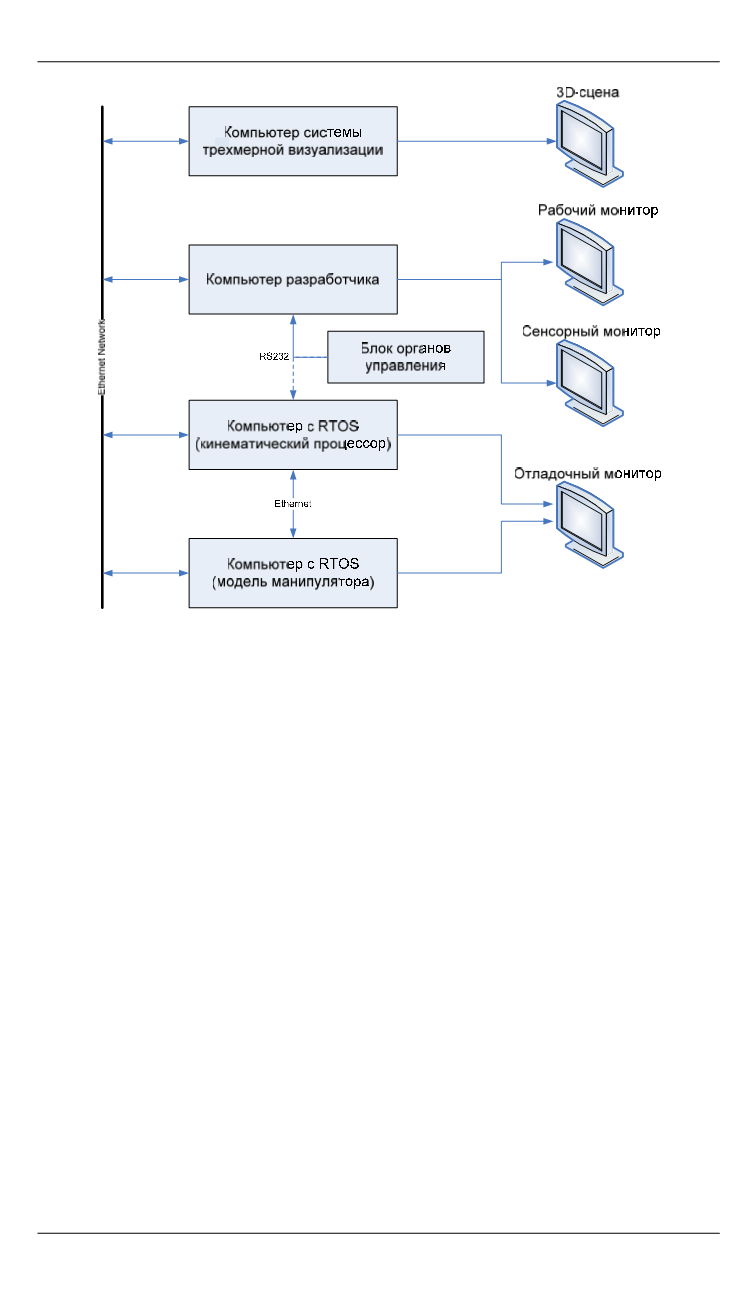
Рис. 2.
Структурная схема стенда математического и полунатурного
моделирования системы управления манипулятором
Система трехмерной визуализации.
Для облегчения восприятия
разработчиком результатов моделирования алгоритма управления
разработана система трехмерной визуализации. Внешний вид экрана
визуализации представлен на рис. 3.
Разработанная система визуализации позволяет строить модель
манипулятора как цепочки звеньев, при этом каждое звено имеет
свою систему координат, а переход между системами координат зве-
ньев задается последовательностью сдвигов и поворотов по произ-
вольным осям. В данной разработке использовался стандартный для
описания манипуляторов набор параметров Денавита — Хартенбер-
га. Система визуализации позволяет отображать произвольные трех-
мерные тела в привязке к любой системе координат с возможностью
коррекции положения локального центра трехмерного тела относи-
тельно начала выбранной системы координат с помощью последова-
тельности сдвигов и поворотов.
Последовательность сдвигов и поворотов между системами ко-
ординат задается в параметризированном виде, а параметр является
переменной, значение которой может быть изменено сторонней про-


