И.О. Сакович, Ю.С. Белов
4
поиск градиентов — границы отмечаются там, где градиент
изображения приобретает максимальное значение;
подавление немаксимумов — только локальные максимумы от-
мечаются как границы;
двойную пороговую фильтрацию — потенциальные границы
определяются порогами;
трассировку области неоднозначности — итоговые границы
устанавливаются путем подавления всех краев, не связанных с опре-
деленными (сильными) границами.
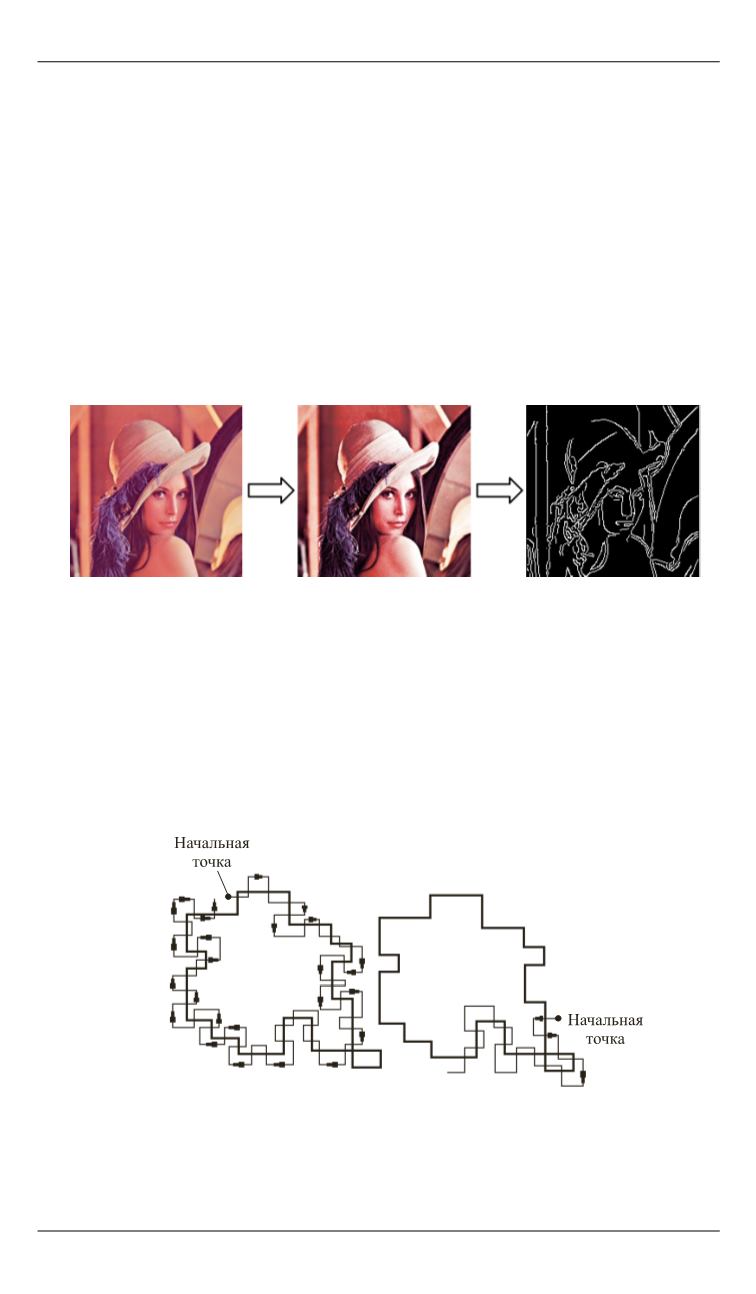
Для уменьшения чувствительности алгоритма к шуму применя-
ется первая производная от гауссианы. После применения фильтра,
изображение становиться слегка размытым (рис. 2).
Рис. 2.
Иллюстрация работы контурного детектора Кэнни
4. Прослеживание контуров
. Метод заключается в последова-
тельном вычерчивании границы между объектом и фоном. Просле-
живающая точка в виде «жука» ползает по изображению до тех пор,
пока не доходит до темной области (объект). Тогда «жук» поворачи-
вается налево и движется по кривой, пока не достигнет границ объек-
та, после этого поворачивается направо и повторяет процесс, пока не
достигнет окрестности начальной точки (рис. 3) [6].
Рис. 3.
Иллюстрация метода прослеживания контуров
5. Кластеризация
. По отношению к скорости и расстоянию ис-
пользуют кластеризацию ближайшего соседа. Обозначим две линии


